NN Deployment
AmebaPro2 has an NN H/W engine to accelerate the neural network inference process. NN models obtained from different AI framework, such as Keras, Tensorflow, Tensorflow Lite, PyTorch, Caffe, ONNX, Darknet and etc, can be converted to network binary graph file by Verisilicon’s Acuity Toolkit. Then, NN model can be deployed on AmebaPro2 easily. Following is the workflow of model deploying:
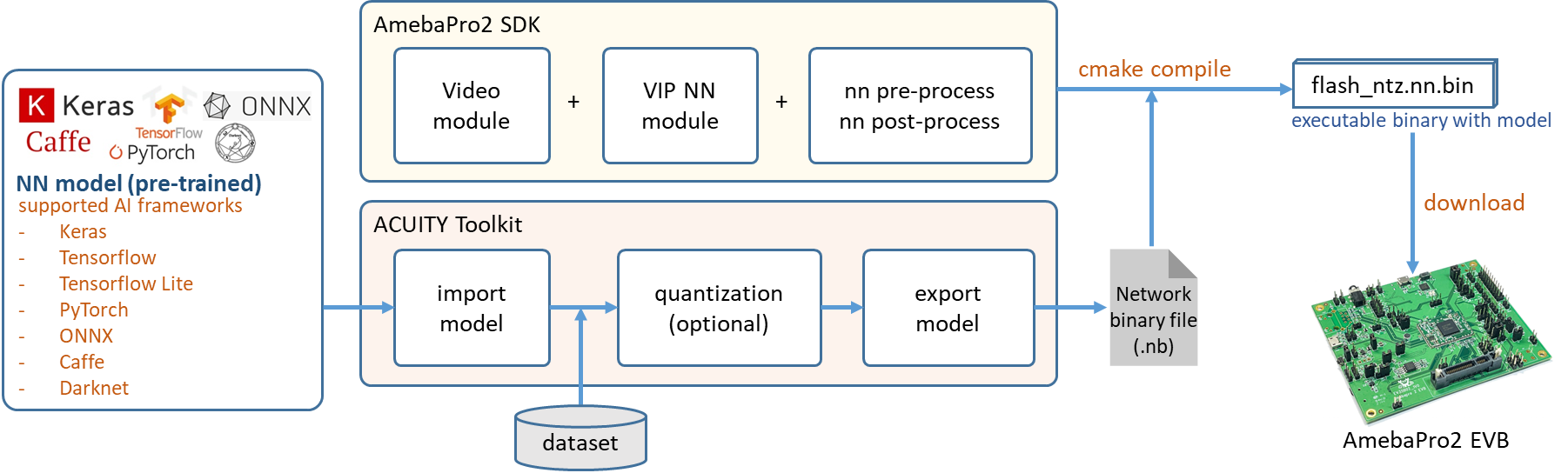
Fig. 2 NN model workflow
Using customized NN model
This section will demonstrate how to deploy a pre-trained model. Take yolov4-tiny pre-trained model for example; Fig. 3 is the flowchart of the whole procedure:
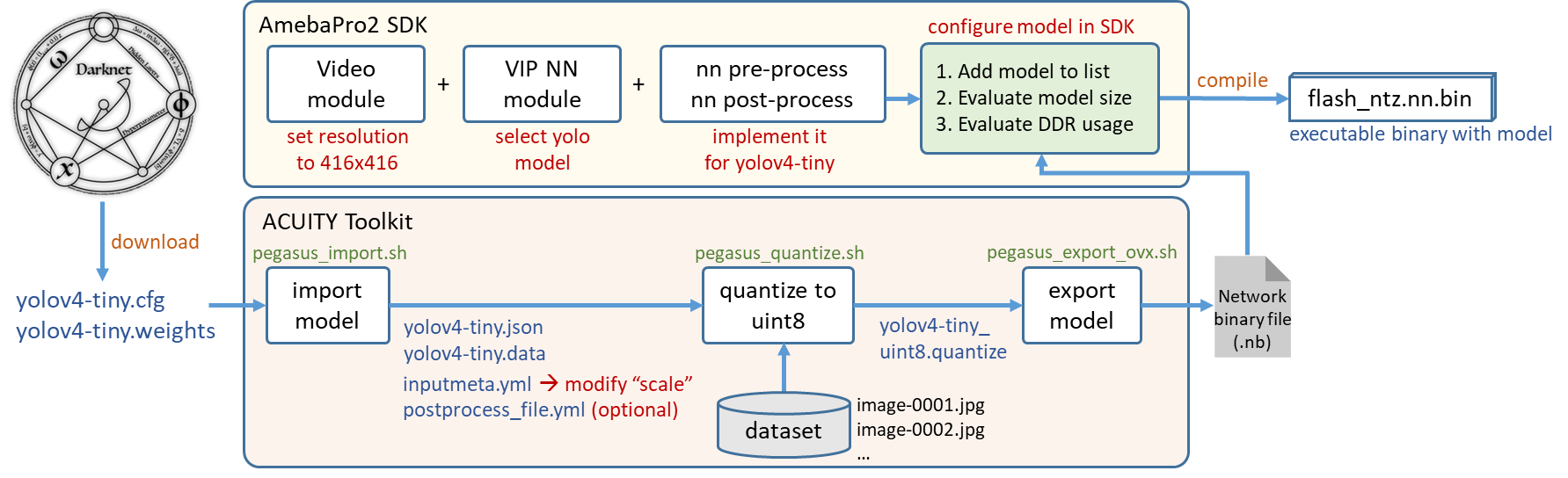
Fig. 3 yolov4-tiny deployment workflow
Setup Acuity toolkit on PC
The Acuity toolkit would be required to generate the NN network binary file from a pre-trained model. The following documents and tools are provided by Verisillicon, and please refer its user guide to setup the PC environment.
Please refer to Realtek AmebaPro2 Model Conversion Tool about how to install Verisilicon’s Acuity Toolkit
Ver. |
Acuity Tool / Document |
Description |
|---|---|---|
Acuity 5.21.1 |
Vivante.VIP.ACUITY.Toolkit.User.Guide-v0.80-20210326.pdf acuity_toolkit_binary_5.21.1.zip acuity-toolkit-whl-5.21.1.zip acuity-examples.zip |
|
Verisilicon_SW_VIP_NBInfo_v1.1.10_20210331.tgz |
|
|
VivanteIDE5.3.0_cmdtools.zip |
|
|
Acuity 6.6.1 |
Verisilicon_Tool_Acuity_Toolkit_6.6.1_Binary_Whl_Src_20220505.tgz |
|
Verisilicon_SW_NBInfo_1.2.4_20220505.tgz |
|
|
Verisilicon_Tool_VivanteIDE_v5.7.0 |
|
|
Acuity 6.18.8 |
Verisilicon_SW_VIP_Acuity_6.18.8_Whl_Src_20250303.tgz acuity_examples_c901149.tgz |
|
Verisilicon_SW_NBInfo_1.2.17_20230412.tgz |
|
|
Verisilicon_Tool_VivanteIDE_v5.8.1 |
|
Note
Viplite driver is the NN driver on AmebaPro2 to work with NN engine. If the customized model is converted by newer AcuityToolkit, it should be used with newer Viplite driver. If the model is converted by old AcuityToolkit, it can be also used with newer Viplite driver. Therefore, user do not need to convert the model by new tool if they upgrade the Viplite driver (NN library in SDK: libnn.a).
AcuityToolkit version |
||||
5.21.1 |
6.6.1 |
6.18.8 |
||
Viplite driver version |
1.3.4 |
V |
X |
X |
1.8.0 |
V |
V |
X |
|
1.12.0 |
V |
V |
V/X |
|
2.0.0 |
V |
V |
V |
|
Step for customized model conversion
User can refer the following acuity toolkit instructions to generate their own model binary. Necessary scripts are in “acuity-examples/Script”. Take yolov4 as example, user can download yolov4-tiny.cfg, yolov4-tiny.weights from https://github.com/AlexeyAB/darknet#pre-trained-models. If the model is converted correctly, the generated yolov4_tiny.nb should be as same as the one provided in SDK.
import the model:
$ ./pegasus_import.sh yolov4_tiny
modify the “mean” and “scale” in yolov4_tiny_inputmeta.yml –> Ex: scale: 0.00392156 (1/255)
quantize the model:
$ ./pegasus_quantize.sh yolov4_tiny uint8
add the following to the command in pegasus_export_ovx.sh
if Acuity 5.21.1:
--optimize 'VIP8000NANONI_PID0XAD' \
--pack-nbg-viplite \
--viv-sdk 'home/Acuity/VivanteIDE5.3.0_cmdtools/cmdtools' \
if Acuity 6.6.1 or 6.18.8:
--optimize 'VIP8000NANONI_PID0XAD' \
--pack-nbg-unify \
--viv-sdk 'home/Acuity/VivanteIDE5.7.0_cmdtools/cmdtools' \
export the NBG file:
$ ./pegasus_export_ovx.sh yolov4_tiny uint8
Then, a network_binary.nb (yolov4_tiny.nb) will be generated.
Note
After the model conversion is completed, it require cooperating with the corresponding pre-processing and post-processing to complete the function of the model. Acuity tool will not generate pre-processing and post-processing files automatically. Users can refer to pre- and post-processing files for existing nn models. In addition, users can check the inference output results with Acuity script: “./pegasus_inference.sh”.
Supported model quantization type on NN accelerator
In order to run the NN model with full capability of HW accelerator, user have to quantize the model with some specific quantization type. For NN hardware on Pro2, the combination of quantizer and qtype in Acuity’s quantization script should be “asymmetric_affine uint8” or “dynamic_fixed_point int8/int16”.
In addition, NN hardware do not have a good support for per-channel quantization. Per-tensor use a quantization parameter(scale,zp) for whole tensor, and per-channel use different quantization parameter for each channel of weights. The NPU on Pro2 doesn’t support every channel have its own quantization parameter(scale,zp), so please use the per-tensor method instead.
quantizer |
qtype |
per-channel or per-tensor |
|---|---|---|
asymmetric_affine |
uint8 |
only per-tensor |
dynamic_fixed_point |
int8/int16 |
only per-tensor |
NPU has three main unit: NN, TP and PPU(SHADER). NN and TP are HW accelerator; PPU(SHADER) is general programmable unit. NN/TP only support “dynamic fixed point int8/int16”, “asymmetric affine uint8” quantization type. Other quantization type will run on PPU, so it will much slower than running on NN/TP. User can use NBinfo tool to check the operation of exported model will run on NN or TP or PPU(SHADER).
Note
Vendor suggests importing the original float32 model into Acuity Toolkit, and doing the quantization with Acuity’s quantization script. User can also quantize their model by their training framework (e.g. tensorflow), and they should ensure the supported quantization types are used.
SDK configuration for customized NN model
The model binary file (.nb) was obtained from previous section. In this section, we will introduce how to add this model binary file to SDK and implement the necessary pre-processing and post-processing.
Add customized model network binary to SDK
After yolov4_tiny.nb generated, we can add this file to SDK folder: “project/realtek_amebapro2_v0_example/src/test_model/model_nb”. All model network binary files will be placed here; the structure should be:
project/realtek_amebapro2_v0_example/src/test_model/
|-- model_nb/
| |-- yolov3_tiny.nb --> yolov3-tiny network binary graph file
| |-- yolov4_tiny.nb --> yolov4-tiny network binary graph file
| |-- yolov7_tiny.nb --> yolov7-tiny network binary graph file
|-- model_yolo.c --> implementation of pre-process & post-process of yolov3,yolov4,yolov7
|-- model_yolo.h
For another example, if you have a converted customized model named “AmebaNet.nb”, you should add it to “test_model/model_nb/” and create two files - model_AmebaNet.c and model_AmebaNet.h. You should implement the pre-process and post-process for AmebaNet in model_AmebaNet.c. Therefore, the folder should be look like
project/realtek_amebapro2_v0_example/src/test_model/
|-- model_nb/
| |-- yolov3_tiny.nb
| |-- yolov4_tiny.nb
| |-- yolov7_tiny.nb
| |-- AmebaNet.nb
|-- model_yolo.c
|-- model_yolo.h
|-- model_AmebaNet.c --> implementation of pre-process & post-process of AmebaNet
|-- model_AmebaNet.h
Note
Remember to add your model_AmebaNet.c to “project/realtek_amebapro2_v0_example/GCC-RELEASE/application application.cmake”. Additionally, we also need to check the configuration of flash size and ddr size for the nn model is enough. Please refer 0 and 1.3.2 to do evaluation.
Next, add model to the model list.
Go to “project/realtek_amebapro2_v0_example/GCC-RELEASE/mp/amebapro2_fwfs_nn_models.json” and add AmebaNet.nb to this list:
{
"msg_level":3,
"PROFILE":["FWFS"],
"FWFS":{
"files":[
"MODEL0",
"MODEL1"
]
},
"MODEL0":{
"name" : "yolov4_tiny.nb",
"source":"binary",
"file":"yolov4_tiny.nb"
},
"MODEL1":{
"name" : "AmebaNet.nb",
"source":"binary",
"file":" AmebaNet.nb"
}
}
Note
If you only want to use AmebaNet.nb, just choose “MODEL1” in “FWFS”-“files”. Otherwise, your final image will become very large since it contain some unused model binary files.
Create a model object can be used by VIPNN module
The vipnn module will use the model object to deploy the model, do model pre-process, trigger model inference and do model post-process.
Therefore, we should create an “nnmodel_t AmebaNet” in model_AmebaNet.c. The following are the necessary functions will be used by VIPNN module, so we should register these function pointers to AmebaNet object after finishing implementation:
nnmodel_t AmebaNet = {
.nb = AmebaNet_get_network_filename,
.preprocess = AmebaNet_preprocess,
.postprocess = AmebaNet_postprocess,
.model_src = MODEL_SRC_FILE,
.name = "AmebaNet"
};
Set the NN model file name used by NN driver
The model name need to be set, so NN driver can open and load the network binary file via file system during runtime deployment.
void *AmebaNet_get_network_filename(void)
{
return (void *) "NN_MDL/AmebaNet.nb";
}
Note
The NN driver will use firmware file system (component/file_system/fwfs) to open and read the model from flash by default. For further information, user can refer “nn file operation layer” used by NN driver – component/file_system/nn/nn_file_op.c.
Implement customized pre-process and post-process
User can do their customized pre-process for the image before passing it to NN model inference; in addition, they can do their customized post-process to decode the output tensor from result of inference.
Implement pre-process in model_AmebaNet.c:
int AmebaNet_preprocess(void *data_in, nn_data_param_t *data_param, void *tensor_in, nn_tensor_param_t *tensor_param)
{
void **tensor = (void **)tensor_in;
//do pre-process here, user can refer model_yolo.c to do it
(uint8_t *)data_in;
(uint8_t *)tensor[0];
(uint8_t *)tensor[1];
//…
//clean the cache since the data will be accessed by NN engine directly
dcache_clean_by_addr((uint32_t *)tensor[0], data_length);
return 0;
}
Implement post-process in model_AmebaNet.c:
int AmebaNet_postprocess(void *tensor_out, nn_tensor_param_t *param, void *res)
{
void **tensor = (void **)tensor_out;
int output_count = param->count;
//decode the tensor data, user can refer model_yolo.c to do it
for (int n = 0; n < output_count; n++) {
(uint8_t *)tensor[n];
//…
}
//fill the result
int od_num = 0;
objdetect_res_t *od_res = (objdetect_res_t *)res;
for (int i = 0; i < box_idx; i++) {
box_t *obj = &res_box[i];
if (obj->invalid == 0) {
od_res[od_num].result[0] = obj->class_idx;
od_res[od_num].result[1] = obj->prob;
od_res[od_num].result[2] = obj->x; // top_x
od_res[od_num].result[3] = obj->y; // top_y
od_res[od_num].result[4] = obj->x + obj->w; // bottom_x
od_res[od_num].result[5] = obj->y + obj->h; // bottom_y
od_num++;
}
}
//return number of result
return od_num;
}
Section 1.4 will demonstrate how to build the NN objection example (mmf2_video_example_vipnn_rtsp_init.c) with yolov4-tiny. If user would like to use their customized model, they can replace default model object “yolov4_tiny” with “AmebaNet”.
NN memory and flash usage evaluation
This section introduce how to evaluate NN model size and DDR usage. The following table shows the memory information of existing model provided in SDK:
Category |
Model |
Input size |
Quantized |
DDR memory |
File size |
|---|---|---|---|---|---|
Object detection |
Yolov3-tiny
Yolov4-tiny
Yolov4-tiny
Yolov7-tiny
NanoDet-Plus-m
NanoDet-Plus-m
|
416x416
416x416
576x320
416x416
416x416
576x320
|
uint8
uint8
uint8
uint8
uint8
uint8
|
6.9 MB (6,946,128 bytes)
7.7 MB (7,712,412 bytes)
7.48 MB (7,840,836 bytes)
8.2 MB (8,597,072 bytes)
4.33 MB (4,542,016 bytes)
4.53 MB (4,746,556 bytes)
|
5.6 MB (5,568,384 bytes)
4.1 MB (4,131,712 bytes)
3.85 MB (4,043,136 bytes)
4.44 MB (4,664,512 bytes)
1.86 MB (1,959,040 bytes)
1.83 MB (1,924,096 bytes)
|
Face detection |
SCRFD
SCRFD
|
640x640
576x320
|
uint8
uint8
|
4.1 MB (4,291,200 bytes)
2.6 MB (2,753,864 bytes)
|
0.68 MB (715,584 bytes)
0.56 MB (583,232 bytes)
|
Face Recognition |
MobileFaceNet
MobileFaceNet
|
112x112
112x112
|
int8
int16
|
1.72 MB (1,799,716 bytes)
5.1 MB (5,343,948 bytes)
|
0.86 MB (904,576 bytes)
3.42MB (3,590,656 bytes)
|
Sound classification |
YAMNet
YAMNet_s
|
15600x1
96x64
|
fp16
hybrid
|
9.2 MB (9,172,348 bytes)
0.73 MB (729,608 bytes)
|
8.7 MB (8,669,888 bytes)
0.67 MB (678,336 bytes)
|
Evaluate memory usage of model
Please use Verisilicon_SW_VIP_NBInfo tool to evaluate the ddr memory usage of the model on PC. Take yolov4-tiny for example, it requires at least 8MB ddr memory
********************************************************************************
Memory Info
********************************************************************************
Total Read Only Memory (bytes): 3737536
Total Command buffer (bytes): 167552
Total Load States (bytes): 34176
Total NN and TP instruction (bytes): 132864
Total PPU instruction (bytes): 512
********************************************************************************
Total Operation Memory (bytes): 3939264
Total Input Memory (bytes): 519168
Total Output Memory (bytes): 215552
Memory Pool (bytes): 2769920
Video memory heap node reserved (bytes): 20480
********************************************************************************
Total Video Memory (bytes): 7464448
Total System Memory (bytes): 247964
********************************************************************************
Therefore, we have to make sure the NN ddr region in linker script is enough for this model.
Check and modify in “projectrealtek_amebapro2_v0_exampleGCC-RELEASEapplicationrtl8735b_ram.ld
/* DDR memory */
VOE (rwx) : ORIGIN = 0x70000000, LENGTH = 0x70100000 - 0x70000000 /* 1MB */
DDR (rwx) : ORIGIN = 0x70100000, LENGTH = 0x73000000 - 0x70100000 /* 49MB */
NN (rwx) : ORIGIN = 0x73000000, LENGTH = 0x74000000 - 0x73000000 /* 16MB */
Note
Please also modify project/realtek_amebapro2_v0_example/GCC-RELEASE/bootloader/rtl8735b_boot_mp.ld to make the NN ddr region be consistent with rtl8735b_ram.ld. In addition, if building a TrustZone project, rtl8735b_ram_ns.ld should be modified instead of rtl8735b_ram.ld.
Evaluate model size on flash
Please make sure the NN region in partition table is larger than your model size, so that the model can be downloaded to flash correctly.
One model
Take yolov4-tiny for example, the model size is 4MB

Fig. 4 model network binary
The nn region length in “projectrealtek_amebapro2_v0_exampleGCC-RELEASEmpamebapro2_partitiontable.json” should not less than 4MB
"nn":{
"start_addr" : "0x770000",
"length" : "0x700000", --> 7MB > yolov4-tiny(4MB)
"type": "PT_NN_MDL",
"valid": true
},
Multi models
If multi models be used, please add up each model size. For example, user want to deploy 4 models – yolov4-tiny, yamnet-s, mobilefacenet and centerface, so the content of “amebapro2_fwfs_nn_models.json” will become:
{
"msg_level":3,
"PROFILE":["FWFS"],
"FWFS":{
"files":[
"MODEL0",
"MODEL1",
"MODEL2",
"MODEL3"
]
},
"MODEL0":{
"name" : "yolov4_tiny.nb",
"source":"binary",
"file":"yolov4_tiny.nb"
},
"MODEL1":{
"name" : "yamnet_s.nb",
"source":"binary",
"file":"yamnet_s.nb"
},
"MODEL2":{
"name" : "mobilefacenet_int16.nb",
"source":"binary",
"file":"mobilefacenet_int16.nb"
},
"MODEL3":{
"name" : "centerface_uint8.nb",
"source":"binary",
"file":"centerface_uint8.nb"
}
}
Check each model size and calculate the total size = 1,535KB + 3,507KB + 663KB + 4,053KB = 9,740KB. It requires at least 10MB flash size for NN.
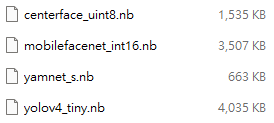
Fig. 5 model network binary size
Therefore, the nn region length in “projectrealtek_amebapro2_v0_exampleGCC-RELEASEmpamebapro2_partitiontable.json” should not less than 10MB
"nn":{
"start_addr" : "0x770000",
"length" : "0xA00000", --> 10MB > total size(9,740KB)
"type": "PT_NN_MDL",
"valid": true
},
Using the NN MMF example with VIPNN module
The yolo nn example is a part of mmf video joined example. Please uncomment the example want to execute.
(project/realtek_amebapro2_v0_example/src/mmfv2_video_example/video_example_media_framework.c)
mmf2_video_example_vipnn_rtsp_init(); yolov4-tiny object detection
The content of this example is located in “mmf2_video_example_vipnn_rtsp_init.c”.
Example |
Description |
Result |
|---|---|---|
mmf2_video_example_vipnn_rtsp_init |
CH1 Video -> H264/HEVC -> RTSP CH4 Video -> RGB -> NN |
RTSP video stream over the network. NN do object detection and draw the bounding box to RTSP channel. |
Set RGB video resolution as model input size
If setting the RGB resolution according to NN model input tensor shape, it can avoid software image resizing and save pre-processing time.
Open “mmf2_video_example_vipnn_rtsp_init.c” and set NN_WIDTH and NN_HEIGHT to 416 (same as yolov4-tiny input size).
#define YOLO_MODEL 1
#define USE_NN_MODEL YOLO_MODEL
…
#if (USE_NN_MODEL==YOLO_MODEL)
#define NN_WIDTH 416
#define NN_HEIGHT 416
static float nn_confidence_thresh = 0.4;
static float nn_nms_thresh = 0.3;
#else
#error Please set model correctly. (YOLO_MODEL)
#endif
…
static video_params_t video_v4_params = {
.stream_id = NN_CHANNEL,
.type = NN_TYPE,
.resolution = NN_RESOLUTION,
.width = NN_WIDTH,
.height = NN_HEIGHT,
.bps = NN_BPS,
.fps = NN_FPS,
.gop = NN_GOP,
.direct_output = 0,
.use_static_addr = 1
};
Choose NN model
Please check the desired models are selected in amebapro2_fwfs_nn_models.json. For example, if we want to use yolov4_tiny, Go to “project/realtek_amebapro2_v0_example/GCC-RELEASE/mp/amebapro2_fwfs_nn_models.json” and set model yolov4_tiny - “MODEL0” be used:
{
"msg_level":3,
"PROFILE":["FWFS"],
"FWFS":{
"files":[
"MODEL0"
]
},
"MODEL0":{
"name" : "yolov4_tiny.nb",
"source":"binary",
"file":"yolov4_tiny.nb"
},
"MODEL1":{
"name" : "yamnet_fp16.nb",
"source":"binary",
"file":"yamnet_fp16.nb"
},
"MODEL2":{
"name" : "yamnet_s.nb",
"source":"binary",
"file":"yamnet_s.nb"
}
}
Note
After choosing the model, user have to check the ddr memory and flash size usage of models.
Build NN example
Since it’s a part of video mmf example, user should use the following command to generate the makefile.
Generate the makefile for the NN project:
cmake .. -G"Unix Makefiles" -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake -DVIDEO_EXAMPLE=ON
Then, use the following command to generate an image with NN model inside:
cmake --build . --target flash_nn
After running the command above, you will get the flash_ntz.nn.bin (including the model) in “projectrealtek_amebapro2_v0_exampleGCC-RELEASEbuild”
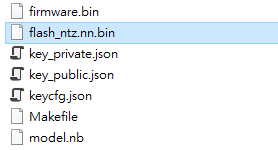
Fig. 6 image with NN model
Then, use the image tool to download it to AmebaPro2:
Nor flash
$ ./uartfwburn.linux -p /dev/ttyUSB? -f ./flash_ntz.nn.bin –b 3000000
Nand flash
$ ./uartfwburn.linux -p /dev/ttyUSB? -f ./flash_ntz.nn.bin -b 3000000 -n pro2
Update NN model on flash
If user just want to update the NN model instead of updating whole firmware, the following command can be used to update NN section on flash partially:
Nand flash
$ ./uartfwburn.linux -p /dev/ttyUSB? -f ./flash_ntz.nn.bin -b 3000000 -n pro2 -t 0x81cf
Validate NN example
Refer the following section to validate nn examples.
Object detection example – Yolov4-tiny
While running the example, you may need to configure WiFi connection by using these commands in uart terminal.
ATW0=<WiFi_SSID> : Set the WiFi AP to be connected
ATW1=<WiFi_Password> : Set the WiFi AP password
ATWC : Initiate the connection
If everything works fine, you should see the following logs
…
[VOE]RGB3 640x480 1/5
[VOE]Start Mem Used ISP/ENC: 0 KB/ 0 KB Free= 701
hal_rtl_sys_get_clk 2
GCChipRev data = 8020
GCChipDate data = 20190925
queue 20121bd8 queue mutex 71691380
npu gck vip_drv_init, video memory heap base: 0x71B00000, size: 0x01300000
yuv in 0x714cee00
[VOE][process_rgb_yonly_irq][371]Errrgb ddr frame count overflow : int_status 0x00000008 buf_status 0x00000010 time 15573511 cnt 0
input 0 dim 416 416 3 1, data format=2, quant_format=2, scale=0.003660, zero_point=0
ouput 0 dim 13 13 255 1, data format=2, scale=0.092055, zero_point=216
ouput 1 dim 26 26 255 1, data format=2, scale=0.093103, zero_point=216
---------------------------------
input count 1, output count 2
input param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.003660, zero_point=0
sizes 1a0 1a0 3 1 0 0
output param 0
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.092055, zero_point=216
sizes d d ff 1 0 0
output param 1
data_format 2
memory_type 0
num_of_dims 4
quant_format 2
quant_data , scale=0.093103, zero_point=216
sizes 1a 1a ff 1 0 0
---------------------------------
in 0, size 416 416
VIPNN opened
siso_array_vipnn started
nn tick[0] = 47
object num = 0
nn tick[0] = 46
object num = 0
…
Then, open VLC and create a network stream with URL: rtsp://192.168.x.xx:554
If everything works fine, you should see the object detection result on VLC player.
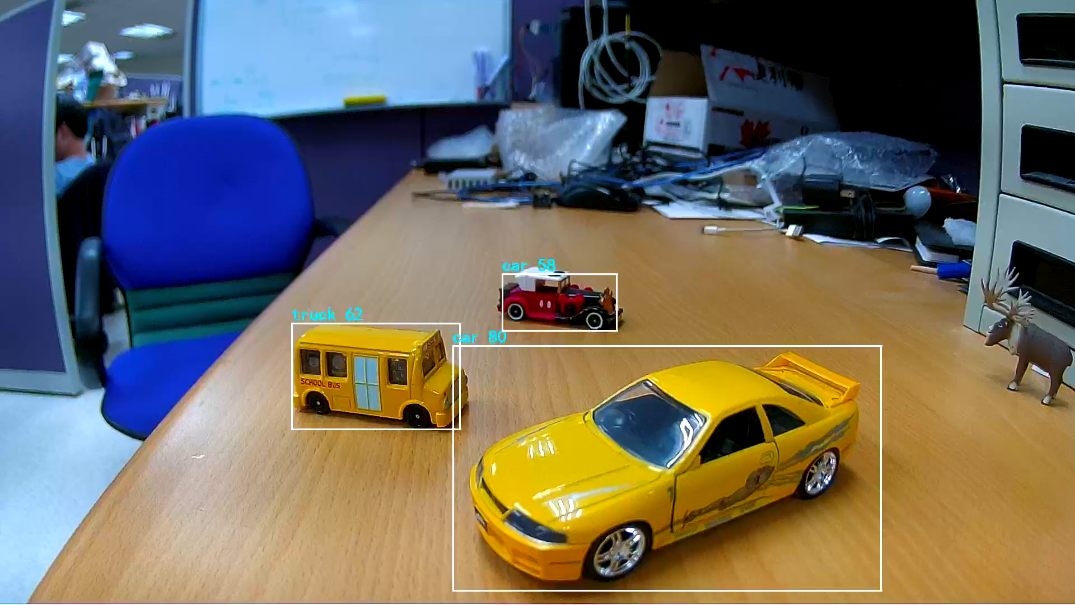
Fig. 7 VLC validation
How to add a pre-process node to customized model (optional)
Sometimes, user may need to do data preprocess before the inference. Acuity Toolkit provide an auto generated pre-process node that can be added to the beginning of user’s customized network, so the data preprocess can run on NN engine and offload the CPU usage. The pre-process node can handle color space conversion, scaling and cropping. User can configure and enable the auto-generated pre-process node by setting “inputmeta.yml” as following:
input_meta:
databases:
- path: dataset.txt
type: TEXT
ports:
- lid: input.1_137
category: image
dtype: float32
sparse: false
tensor_name:
layout: nchw
shape:
- 1
- 3
- 320
- 576
fitting: scale
preprocess:
reverse_channel: false
mean:
- 127.5
- 127.5
- 127.5
scale: 0.0078125
preproc_node_params:
add_preproc_node: true
preproc_type: IMAGE_NV12
preproc_image_size:
- 576
- 320
Note
If user want to use this feature, please use Acuity 6.18.8 and VIPLite driver 1.12.0. The older version cannot support it well.
How to load model from SD card instead of flash (optional)
Download model to flash may cost lots of time. Therefore, in development period, developer can save their model in SD card and the viplite driver can load the network binary file from SD card instead of flash. Here are the steps:
Prepare a SD card and create a folder named as “NN_MDL”, then copy your model into this folder.
Go to “component/file_system/nn/nn_file_op.c” and define MODEL_SRC as MODEL_FROM_SD.
#define MODEL_FROM_FLASH 0x01
#define MODEL_FROM_SD 0x02
#define MODEL_SRC MODEL_FROM_SD
Build the NN example with following command
cmake --build . --target flash
How to modify customized model name after conversion (optional)
After running export script in Acuity, user can get their customized model binary. The binary graph format is shown as following table; the network name is located at 12 bytes offset from head with 64 bytes length.
Section |
Field |
Data Type |
Count |
Size in Bytes |
Meaning |
Header |
Magic |
CHAR |
4 |
4 |
A magic number for a valid binary graph file must be “VPMN”. |
… |
UINT32 |
1 |
4 |
… |
|
… |
UINT32 |
1 |
4 |
… |
|
Network_name |
CHAR |
64 |
64 |
Indicates the name of a network. |
|
… |
UINT32 |
1 |
4 |
… |
Therefore, user can edit these 64 bytes in network binary file by any hex editor
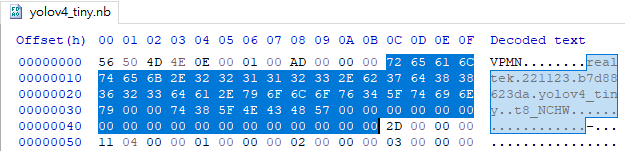
Fig. 8 use hex editor to modify model name
A network name query API is used in module_vipnn.c to get the model name during deployment:
vip_query_network(ctx->network, VIP_NETWORK_PROP_NETWORK_NAME, ctx->network_name);
dprintf(LOG_INF, "network name:%s\n\r", ctx->network_name);
After modifying, you should see the following log (User may need to change the debug log level to LOG_INF to see this information in console):
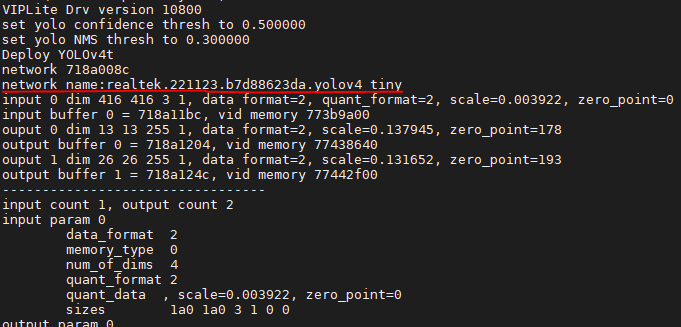
Fig. 9 model name
Model Security
Some customer has their in-house self-trained model, so the model security is important to protect their intellectual property. Now, SDK support model authentication and encryption. Customer can deploy and run their model on the device securely.
Support model graph binary authentication
Support model graph binary encryption
The authentication and decryption are processed by cryptographic hardware accelerate engine. The key used for decryption will be stored in on-chip eFuse OTP.
Secure feature |
Algorithm Support |
Key management |
|---|---|---|
Model Authentication |
Hash: sha256 Signature: EdDSA_ED25519 |
Use private key to sign model on PC or server. Use public key verify model signature. Please use the FW signing key to sign the model. NN module will use the public key in FW manifest to verify the signature at runtime. Note: user must enable trust boot feature, so the public key can then be verified by chain of trust. |
Model Encryption |
AES_256_CBC |
Use AES-256 key to encrypt model on PC or server. Please use the “user eFuse OTP KEY 0” to encrypt the model. NN module will use this key to decrypt the model at run time. Note: if there is no “user eFuse OTP KEY 0” on your device, user should inject this key by eFuse API – efuse_crypto_key_write(key, 0, 1). This key is one-time-programmable, so please discuss with your team before writing. |
Model Authentication – Hash and Signature check
Model authentication including integrity check and trust check. After signing the model by the signing tool, a sha256 hash and signature will be appended at the end of model, as shown in Fig. 10 (b). The signature is used to verify the trust of hash, and the sha256 hash is used to verify the integrity of the model. Therefore, we can guarantee that the model is not tampered and is from trusted source.
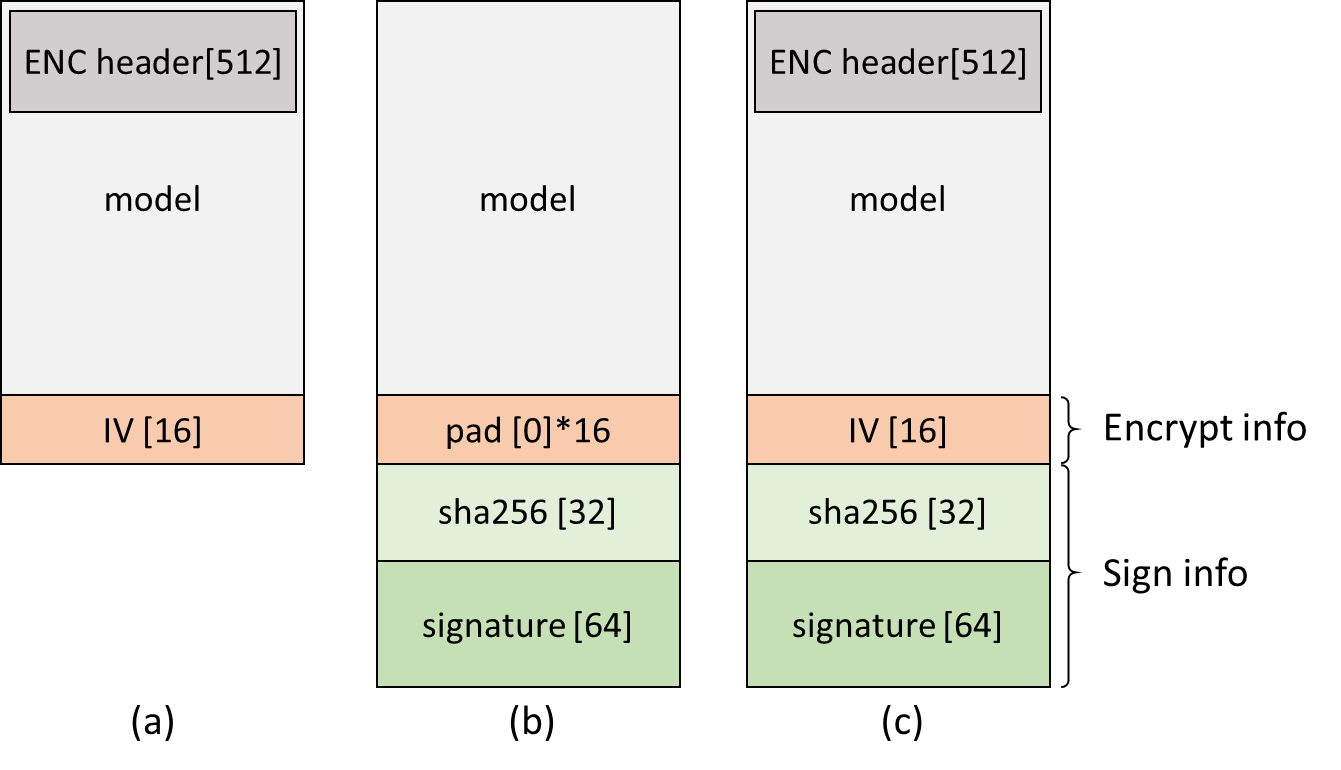
Fig. 10 signed model format: (a) encrypted only, (b) signed only, (c) signed + encrypted
Model Encryption – Cypher Text Decryption
User can also encrypt the model graph binary (.nb file) to avoid people parsing it. It means the model should not be a plain text data on flash. Usually, user only need to encrypt the “fixed header” part of the model, which is the first 512 bytes of the network graph binary.
Section |
Size in Bytes |
Header and Tables |
512 (Fixed) |
Data Sections |
Dynamic |
However, before model deploying, the model should be decrypted, the NN driver can create the network correctly. Currently, SDK support to decrypt the encrypted model header by AES-256-CBC mode with the user OTP eFuse key.
After encrypting the model by the signing tool, a random generated IV will be added to encrypt info, as shown in Fig. 10 (a). User can also both sign and encrypt the model, then IV, hash and signature will all be appended, as shown in Fig. 10 (c).
Note
Hardware crypto engine on the device can speed up the decryption process.
SDK Configuration
Model signature validation and decryption feature are both disabled in SDK by default. User should go to platform configuration file “project/realtek_amebapro2_v0_example/inc/platform_opts.h” to enable it:
/* For NN configuration */
#define CONFIG_NN_AES_ENCRYPTION 1
#define CONFIG_NN_HASH_SIGNATURE_CHECK 1
Note
These two feature can be enabled independently.
Secure Deployment Flow
After enabling NN decryption or hash/signature check feature in SDK, Pro2 will deploy the model securely according to the flow as shown in Fig. 11.
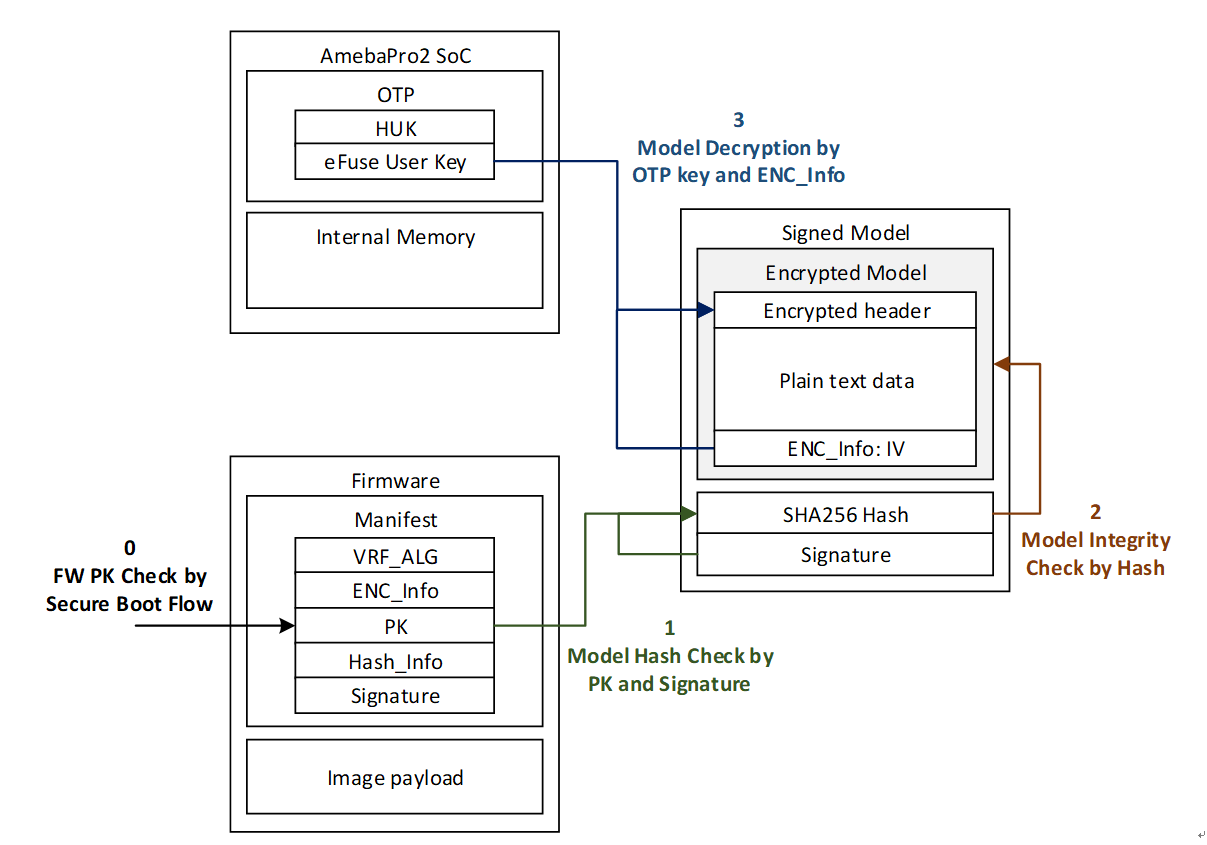
Fig. 11 secure NN model deployment
Signing and Encryption PC Tool
User can find the tool in “project/realtek_amebapro2_v0_example/src/test_model/model_nb/model_signature/model_sign_ed25519.py”. It’s implemented by python script.
Before using the tool, user may need to install following package (PyNaCl, PyCrypto…):
$ pip install pynacl
$ pip install pycryptodome
The format of any key is a Hex string file. For example, the content of 32-bytes signing key (model-sign-key) will be look like:
104008de9c2fed8fbb20139ea3eafb6b60e8fb8a603b488c90586e2750b7f3ae
The followings are the command usage to sign or encrypt the model. The tool also provide the corresponding verification command.
Sign only
Sign the model with sign key (ED25519 public key)
$ python3 model_sign_ed25519.py --sign-key "model-sign-key" --model "../yolov4_tiny.nb"
Verify the model with verify key (ED25519 secret key)
$ python3 model_sign_ed25519.py --verify-key "model-verify-key" --signed-model "../yolov4_tiny.nb.sig"
Note
After signing, user can get signed model – yolov4_tiny.nb.sig. User should download this model to flash partition or file system.
Encrypt only
Encrypt the model with AES key (AES-256-CBC symmetric key), the IV will be generated randomly by the tool
$ python3 model_sign_ed25519.py --model "../yolov4_tiny.nb" --enc-key "model-enc-key"
Decrypt the model with same AES key
$ python3 model_sign_ed25519.py --signed-model "../yolov4_tiny.nb.enc" --enc-key "model-enc-key"
Note
After encrypting, user can get encrypted model – yolov4_tiny.nb.enc. User should download this model to flash partition or file system.
Sign and Encrypt
Sign and encrypt the model with sign key and encrypt key
$ python3 model_sign_ed25519.py --sign-key "model-sign-key" --model "../yolov4_tiny.nb" --enc-key "model-enc-key"
Decrypt and verify the model signature with verify key and encrypt key
$ python3 model_sign_ed25519.py --verify-key "model-verify-key" --signed-model "../yolov4_tiny.nb.enc.sig" --enc-key "model-enc-key"
Note
After signing and encrypting, user can get encrypted model with signature – yolov4_tiny.nb.enc.sig. User should download this model to flash partition or file system.
Performance Test
The Table 8 is the performance test result on Pro2 by using yolov4-tiny 416x416 model:
Security feature |
Time (ms) |
Remark |
|
|---|---|---|---|
Authentication |
Signature check |
3 |
Check the signature of 32 bytes model hash. Time is fixed |
Hash check |
38 |
Depend on model size (yolov4-tiny: 4MB) |
|
Decryption |
Cipher text decrypt |
3 |
Always decrypt 512 bytes fixed header. Time is fixed |
Post-process PC Development Tool
User can develop their post-processing on PC and check the decoding result is correct. After running the inference script in AcuityToolkit, user can get the output tensor of the model. Then, we can develop the tensor decoding process on PC to get the comprehensible results such as object class, probability and bounding box.
The post-process API interface used by development tool and Pro2 are same, so it would be easier for user to deploy their model on the device.
Take Yolov4 as example, the following are the steps to use the tool:
Develop post-process in model_yolo_sim.c
Setup tensor parameters from NBinfo. After running the export scrip in AcuityToolkit, user will get a model binary file. The required model information for PC tool will be configured automatically by this model binary file. User need to set the model binary path in main.c:
static void yolo_pc_configure_tensor_param(nn_tensor_param_t *input_param, nn_tensor_param_t *output_param)
{
/* Configure the model parameter from nb file */
char *nbg_filename = "../../test_model/model_nb/yolov4_tiny.nb";
config_param_from_nb_file(nbg_filename, input_param, output_param);
}
int yolo_simulation(void)
{
// configure tensor param
nn_tensor_param_t input_param, output_param;
yolo_pc_configure_tensor_param(&input_param, &output_param);
// …
}
Get output tensor from Acuity inference. After running the inference scrip in AcuityToolkit, the output tensor of the model can then be obtained. And user also have to set the path of these output tensor:
int yolo_simulation(void)
{
// …
// prepare Acuity pre-generated output tensor from file
char *acuity_tensor_name[16];
acuity_tensor_name[0] = "../data/yolo_data/iter_0_output_30_65_out0_1_255_13_13.tensor";
acuity_tensor_name[1] = "../data/yolo_data/iter_0_output_37_76_out0_1_255_26_26.tensor";
void *pp_tensor_out[16];
memset(pp_tensor_out, 0, sizeof(pp_tensor_out));
acuity_output_tensor_conversion(acuity_tensor_name, pp_tensor_out, &output_param);
// …
}
Build project with command
mkdir build && cd build
cmake .. -G"Unix Makefiles"
make -j4
Execute the program to run your post-process
./nn_postprocess
Check the process result. An image with bounding boxes will be saved in data/yolo_data/prediction.jpg
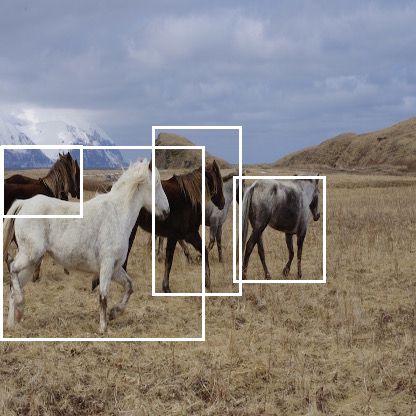
Fig. 12 detection result
Appendix A. Acuity Supported Operation Layer
ONNX to ACUITY Operation Mapping
ONNX Operation |
ACUITY Operation |
|---|---|
Abs |
abs |
Add |
add |
And |
logical_and |
ArgMax |
argmax |
ArgMin |
argmin |
Atan |
atan |
Atanh |
atanh |
BatchNormalization |
batchnormalize |
Cast |
cast |
CastLike |
cast |
Ceil |
ceil |
Celu |
celu |
Clip |
clipbyvalue |
Concat |
concat |
Conv |
conv1d/group_conv1d/depthwise_conv1d/convolution/conv2d_op/depthwise_conv2d_op/conv3d |
ConvTranspose |
deconvolution/deconvolution1d |
Cos |
cos |
Cumsum |
cumsum |
DepthToSpace |
depth2space |
DequantizeLinear |
dequantize |
DFT |
dft |
Div |
divide |
Dropout |
dropout |
Einsum |
einsum |
Elu |
elu |
Equal |
equal |
Erf |
erf |
Exp |
exp |
Expand |
expand_broadcast |
Floor |
floor |
Gather |
gather |
GatherElements |
gather_elements |
GatherND |
gathernd |
Gemm |
matmul/fullconnect |
Greater |
greater |
GreaterOrEqual |
greater_equal |
GridSample |
gridsample |
GRU |
gru |
HammingWindow |
hammingwindow |
HannWindow |
hannwindow |
HardSigmoid |
hard_sigmoid |
HardSwish |
hard_swish |
InstanceNormalization |
instancenormalize |
LeakyRelu |
leakyrelu |
Less |
less |
LessOrEqual |
less_equal |
Log |
log |
Logsoftmax |
log_softmax |
LRN |
localresponsenormalization |
LSTM |
lstm |
MatMul |
matmul/fullconnect |
Max |
eltwise(MAX) |
MaxPool/AveragePool/GlobalAveragePool/GlobalMaxPool |
pooling/pool1d/pool3d |
MaxRoiPool |
roipooling |
Mean |
eltwise(MEAN) |
MeanVarianceNormalization |
instancenormalize |
Min |
eltwise(MIN) |
Mish |
mish |
Mod |
mod |
Mul |
multiply |
Neg |
neg |
NonZero |
nonzero |
OneHot |
onehot |
Or |
logical_or |
Pad |
pad |
Pow |
pow |
Prelu |
prelu |
QLinearConv |
convolution/conv1d |
QLinearMatMul |
matmul |
QuantizeLinear |
quantize |
Reciprocal |
variable+divide |
ReduceL1 |
abs+reducesum |
ReduceL2 |
reducesum+multiply+sqrt |
ReduceLogSum |
reducesum+log |
ReduceLogSumExp |
exp+reducesum+log |
ReduceMax |
reducemax |
ReduceMean |
reducemean |
ReduceMin |
reducemin |
ReduceProd |
reduceprod |
ReduceSum |
reducesum |
ReduceSumSquare |
multiply+reducesum |
Relu |
relu |
Reshape/Squeeze/Unsqueeze/Flatten |
reshape |
Resize |
image_resize |
ReverseSequence |
reverse_sequence |
Round |
round |
ScatterND |
scatter_nd_update |
Selu |
selu |
Shape |
shapelayer |
Sigmoid |
sigmoid |
Sign |
sign |
Silu |
swish |
Sin |
sin |
Size |
size |
Slice |
slice/stridedslice |
Softmax |
softmax |
Softplus |
softrelu |
Softsign |
abs+add+divide+variable |
SpaceToDepth |
space2depth |
Split |
split/slice |
Sqrt |
sqrt |
Squeeze |
squeeze |
STFT |
stft |
Sub |
subtract |
Sum |
eltwise(SUM) |
Tanh |
tanh |
Tile |
tile |
TopK |
topk |
Transpose |
permute |
Unsqueeze |
reshape |
Upsample |
image_resize |
Where |
where |
Xor |
not_equal |
Darknet to ACUITY Operation Mapping
Darknet Operation |
ACUITY Operation |
|---|---|
avgpool |
pooling |
batch_normalize |
batchnormalize |
connected |
fullconnect |
convolutional |
convolution |
depthwise_convolutional |
convolution |
leaky |
leakyrelu |
logistic |
sigmoid |
maxpool |
pooling |
mish |
mish |
region |
region |
relu |
relu |
reorg |
reorg |
route |
concat/slice |
scale_channels |
multiply |
shortcut |
add/slice+add/pad+add |
softmax |
softmax |
swish |
swish |
upsample |
upsampling |
yolo |
yolo |
Appendix B. Acuity Supported AI Framework
AI Framework |
Import File Format |
|---|---|
Caffe |
.caffemodel |
TensorFlow |
.pb |
TensorFlow Lite |
.tflite |
Darknet |
.cfg |
ONNX |
.onnx |
PyTorch |
.pt |
Keras |
.h5 |
Note
No quantization is needed on Acuity Networks converted from ONNX, TensorFlow and Tensorflow Lite models that have been quantized. Kindly note that per-channel quantized models are NOT supported on Pro2 NPU, please ensure that your model is per-tensor quantized.